
VERTEX AIR CASE STUDIES

Drone Based Measured Survey for Major Retail Complex Roof
See how our team utilised drone LiDAR to rapidly map an expansive, complex retail roof in Grays, capturing hidden plant equipment for precise AutoCAD planning.

Drone LiDAR Survey for Commercial Rooftop Development in Central London
See how our team navigated complex Central London airspace to safely capture high-level drone LiDAR data for a commercial rooftop restaurant conversion.

Confined Space Drone & Photogrammetry Survey for Adelphi Theatre, Sheffield
See how our team combined rope access, confined space drones, and external photogrammetry to safely map the dilapidated Adelphi Theatre in Sheffield for critical renovation planning.

Annual Drone Roof Surveys for Multiple Property Portfolio Nationwide
Discover how Vertex Air safely surveyed over 500 housing property roofs across the UK in just 12 months, delivering actionable condition reports without the need for scaffolding or MEWPs.

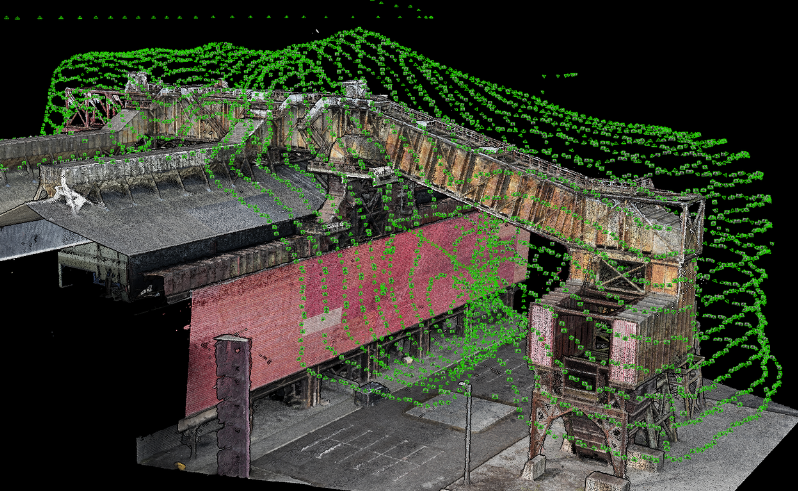
Drone LiDAR & Photogrammetry Survey for Commercial Property
Discover how our surveyors utilised a hybrid approach of drone LiDAR and photogrammetry to generate highly accurate 2D CAD elevations and remote site planning tools for a large commercial office block.

Confined Space Drone Survey for Historic Theatre Renovation in Camden, London
See how Vertex Air used the Elios 3 confined space drone to safely capture a 3D point cloud of a historic London theatre's inaccessible roof void and fly tower.

Confined Space Drone & LiDAR Survey for Underground Culvert Inspection
Discover how our surveyors safely mapped a hazardous, unlit 115m underground culvert using a confined space drone equipped with an advanced LiDAR payload.
3D Photogrammetry & Digital Twin of an Industrial Dust Extractor
Using advanced drone photogrammetry to create a highly accurate, interactive 3D digital twin of a complex industrial dust extractor, completely eliminating work at height risks.

Confined Space Drone Inspection of an Anaerobic Digestion Tank
See how our team safely captured a 3D LiDAR point cloud and visual data inside a toxic anaerobic digestion tank, eliminating hazardous human entry and costly downtime.

Aerial Thermal Drone Survey for District Heating Network Leak Detection
Discover how our ITC Level 3 thermographers used aerial thermal drone surveys to rapidly pinpoint underground district heating leaks across a vast urban network.